1. Telerobotics, Shared Control & Motion Planning
Project: Shared-control of a Mobile Robot via Haptic Feedback
This project addressed the challenge of operating mobile robots in dynamic environments where time delays and obstacles compromise safety. I developed a shared-control architecture where a human operator controls the robot via a haptic device, but the robot's autonomy (Motion Planning) intervenes to avoid collisions.
- Motion Planning: Developed a geometric-based motion planning algorithm (Receding Horizon Control) that navigates unknown environments.
- Key Innovation: Synergized impedance control with convex optimization to blend human input with autonomous safety constraints.
- Outcome: The system successfully navigated dynamic environments with moving obstacles.
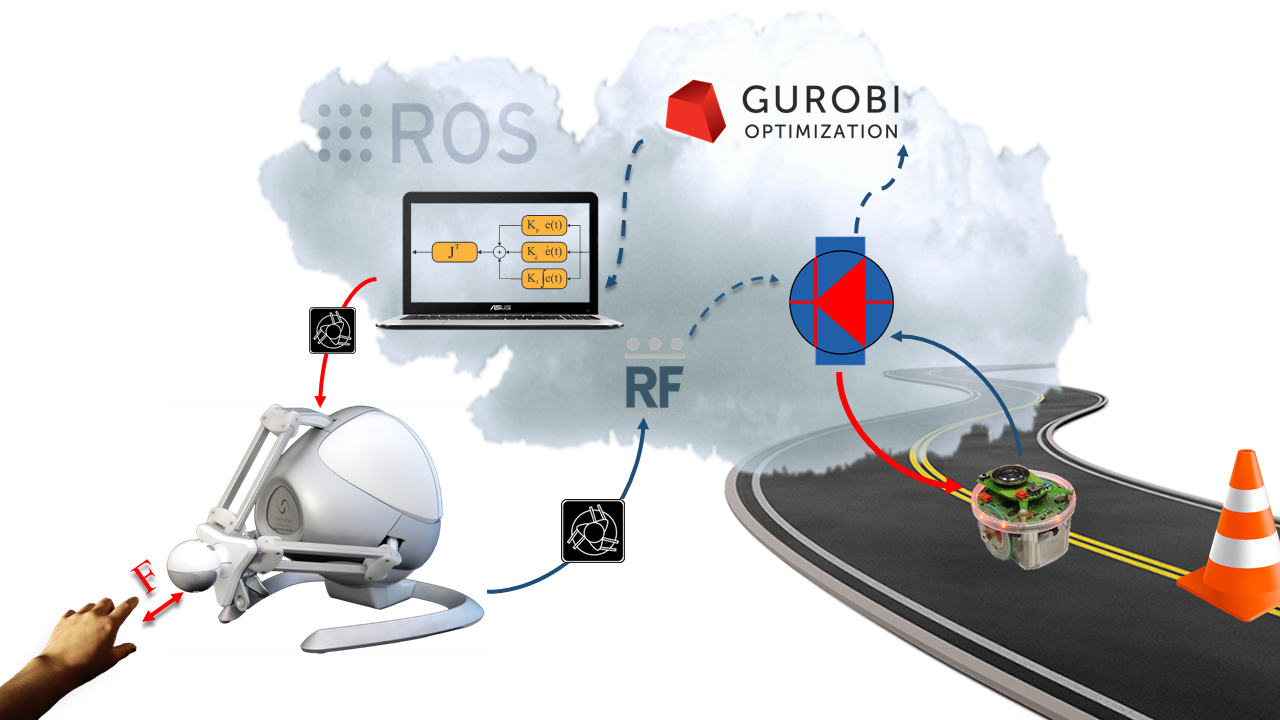
Figure: Schematic of deployed teleoperation.
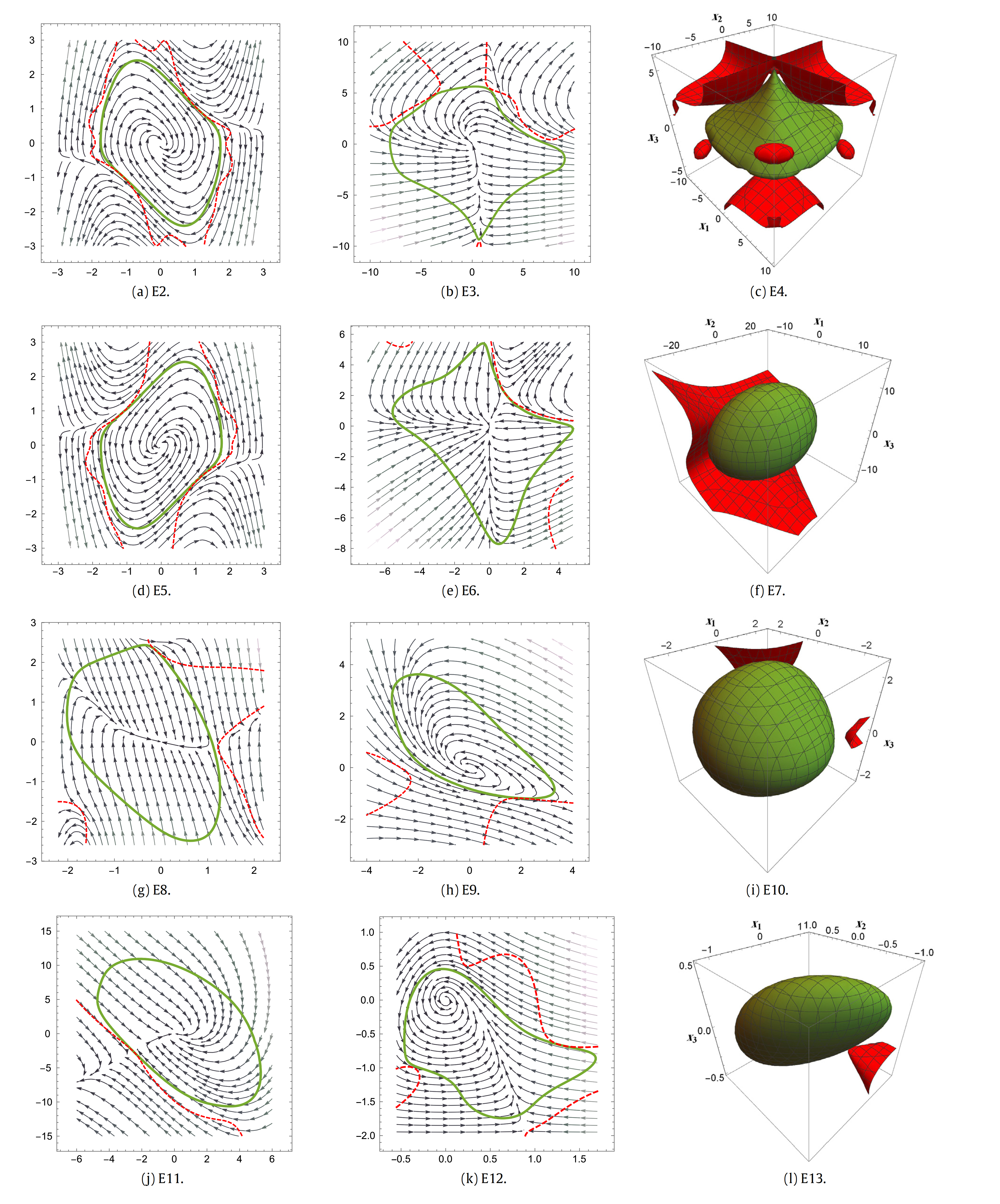
Experimental validation of the shared-control framework avoiding dynamic obstacles.
Experimental validation of the motion planning for a single mobile robot.
Relevant Publications:
- M. Zarei, N. Kashi, M. Tale Masouleh, A. Kalhor, "Experimental Study on Shared-control of a Mobile Robot with a Haptic Device by a Synergy of Receding Horizon, Convex Optimization and Impedance Control Concept," Journal of Intelligent & Robotic Systems, 2020. (Featured on Cover)
- M. Zarei, et al., "Experimental study on optimal motion planning of wheeled mobile robot using convex optimization and receding horizon concept."
- M. Zarei, et al., "An optimal motion planning and obstacle avoidance algorithm based on the finite time velocity obstacle approach."